The PlayScape - Interactive Furniture at TU Delft Campus 2022, Netherlands, Delft
#InteractiveFurnitureDesign, #tudelft, #roboticdesign, #2023, #Netherlands, #FutureTrendsAndPrototypes, #ParticipatoryMediaArchitectureandInfrastructures




Our vision for the interactive design is the development of outdoor and indoor furniture at the TU Delft campus. The project combines the four most important values - interactivity, flexibility, self-sufficiency, and playfulness. Following the idea of a “playground for students”, we developed the concept of modular furniture that can be variously assembled in exteriors and interiors. PlayScape contributes to social interactions within the permanent wooden frame and the removable rubber cells: space to work, rest, or do sports. Users can choose and assemble diverse cell types based on their needs. The project creates infinite layout and topology possibilities depending on the site context introducing modularity and its uniqueness.
PlayScape was designed as a vision of indoor and outdoor campus furniture for TU Delft students and employees. As a space for innovation, the campus needs stimulating elements in the public space for creativity and relaxation. Therefore, a playground became an inspiration for the project, which encourages interaction with the space. The furniture is adjustable and can vary in size depending on the context site or the desired programme. Subsequently, it can be placed in different locations within the TU Delft campus - for example, inside the park or the public square. The furniture consists of a permanent wooden loadbearing structure and removable rubber cells that can be freely disassembled or linked to create multi-person furniture. The infill units embody the values of the project - interactivity, flexibility, self-sufficiency, and playfulness. They create a library that consists of a charging unit powered by solar panels, a water unit that collects and filtrates rainwater, a luminous unit passively giving back light and warmth, a storage unit for personal belongings, a green unit with diverse plants or insect houses and furniture unit where users can sit, relax, and interact in alternate ways. The design is based on the computational approach using various algorithms created in Grasshopper and Python. The 3D point cloud is a base that generates a 3D Voronoi pattern, further developed by the parameters of size, porosity, canopy thickness and volume differentiation of individual cells. After experimenting with various form solutions, we led the selected design to optimise the load-bearing structure with Karamba. Furthermore, two chosen structural nodes were developed and optimised using an algorithm developed at TU Delft. The scaled node’s prototype was done to verify the building process and apply it to the CV algorithm. Finally, the HRI tests used the model, which supports innovation and expands possibilities for future building methods.
http://uf.roboticbuilding.eu/index.php/project01:W12022G1
Poster
Details
Team members : Alicja Rudnicka, Marta Zapasnik, Paulina Panus, Bendert van Dijk, Emir Erolsun
Supervisor : H. Bier, A. Hidding, S. Khademi, C. van Engelenburg, A. Luna Navaro, S. Brancart, V. Laszlo
Institution : Technische Universiteit Delft
Descriptions
Technical Concept : The load-bearing 3D Voronoi structure was optimised and composed of wooden beams 10x10cm to 20x20cm. The form is 4.6m in height and has 35% volume differentiation. Nodes were developed with Topos algorithm including gravity, activity-related and infill forces. Post-processing optimisation made it efficient and aesthetic to further 3D print and prototype the node. The infill cells' porous structure is 3D printed with a rubber-like material. They connect by inner magnets. The size varies 70-100cm by 50-90cm. With 90% porosity and material density 0,5g/cm3, the cell weighs up to 15kg. Therefore, it should be tested to obtain a comfortable weight of max 5kg. The Computer Vision was programmed with Python libraries. It used a 2D visual of node’s elements to detect and measure its dimensions. The script was transformed to robotic arm and tested the potential of HRI in the construction process.
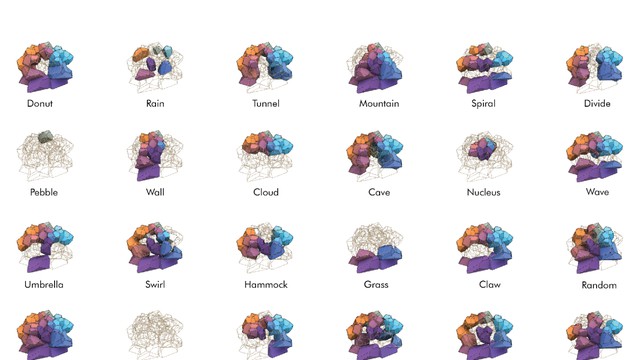
Visual Concept : The main visual feature is led by adjustability. The structure can be used in versatile surroundings that influence its final appearance. PlayScape form is based on transitions between porous-fixed and solid-removable elements. During the process, we developed twenty-four proposals of diverse topologies: (doughnut, tunnel, mountain, spiral, wall, cloud…) varying in overall porosity, cell volume differentiation and size. The main structure and individual cells are both based on a 3D Voronoi pattern. Its diversity and point cloud origin allow each module to be unique. The assembly identification was explored in terms of positive-negative shapes, patterns and real-life puzzles. Moreover, a colour coding layer was added with a gradient shell, optionally dual or multicolour. Number, direction or map ideograms can be added to make the re-assembly more intuitive for users.
Credits
A. Rudnicka, B. van Dijk, E. Erolsun, M. Zapasnik, P. Panus
A. Rudnicka, B. van Dijk, E. Erolsun, M. Zapasnik, P. Panus
A. Rudnicka, B. van Dijk, E. Erolsun, M. Zapasnik, P. Panus
A. Rudnicka, B. van Dijk, E. Erolsun, M. Zapasnik, P. Panus
A. Rudnicka, B. van Dijk, E. Erolsun, M. Zapasnik, P. Panus
A. Rudnicka, B. van Dijk, E. Erolsun, M. Zapasnik, P. Panus
A. Rudnicka, B. van Dijk, E. Erolsun, M. Zapasnik, P. Panus